3D定位系统
除了通常用于多立柱系统定位的X-Y定位系统外,CFM提供3D定位系统。当将试验样品和加载机构朝向彼此定位时,这些特别适用。
以下两个示例展示了应用和技术特点。根据客户的喜好,每种移动和锁紧机构都可以手动或自动执行,每种自由度都可以单独执行。定位系统也可以仅设计为具有某些平移或旋转自由度。我们CFM期待为您的特定应用提供报价。
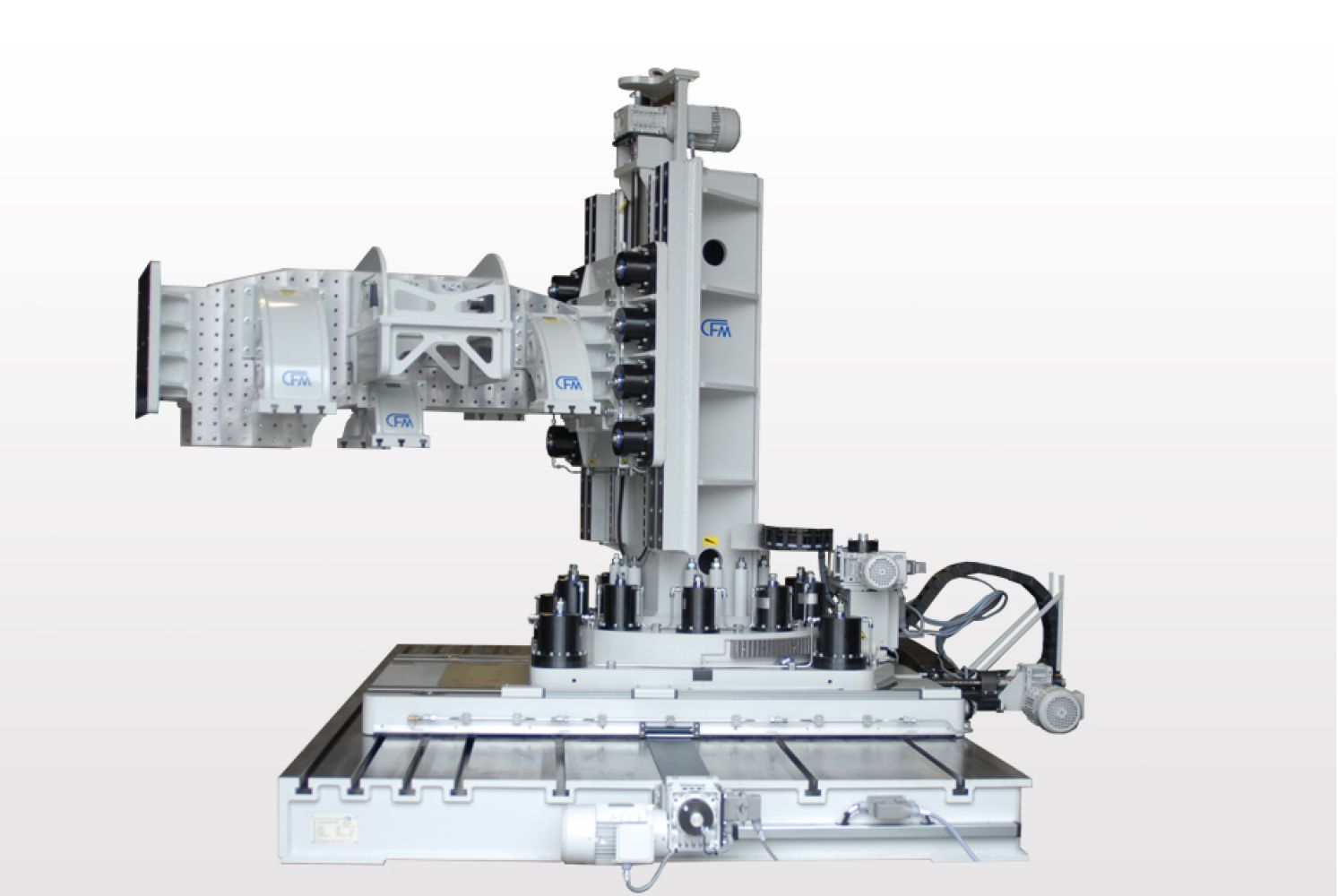
头枕冲击3轴定位系统
CFM的3D定位系统允许头枕冲击摆锤的配置和定位。它提供了在纵向、横向和垂直方向上朝向试验样品调整冲击机制的功能。
3D定位系统主要包括安装板、Y定位板和安装在其上的可在X方向上横向移动的柱。该柱支撑着角板支架,该支架在Z方向上横向移动,并进一步适应头枕冲击摆锤。所有轴都由主轴驱动器和电动机驱动。
沿T形槽进行线性移动,T形槽也用于锁紧。为此,采用了液压弹簧锁紧缸。当释放压力时,它们在相应的板之间形成安全和高强度的连接。施加压力释放它们并允许部件移动。
控制系统控制全自动释放和锁紧及手动或自动沿线性轴移动。导向的位置可以保存到数据库中。在以后的测试中,可以再次自动引用数据。这确保了具有高重复性的高效测试。
PLC还接收并显示来自相关开关的位置信号。对信号的分析使位置误差不会累积,提高了定位精度。
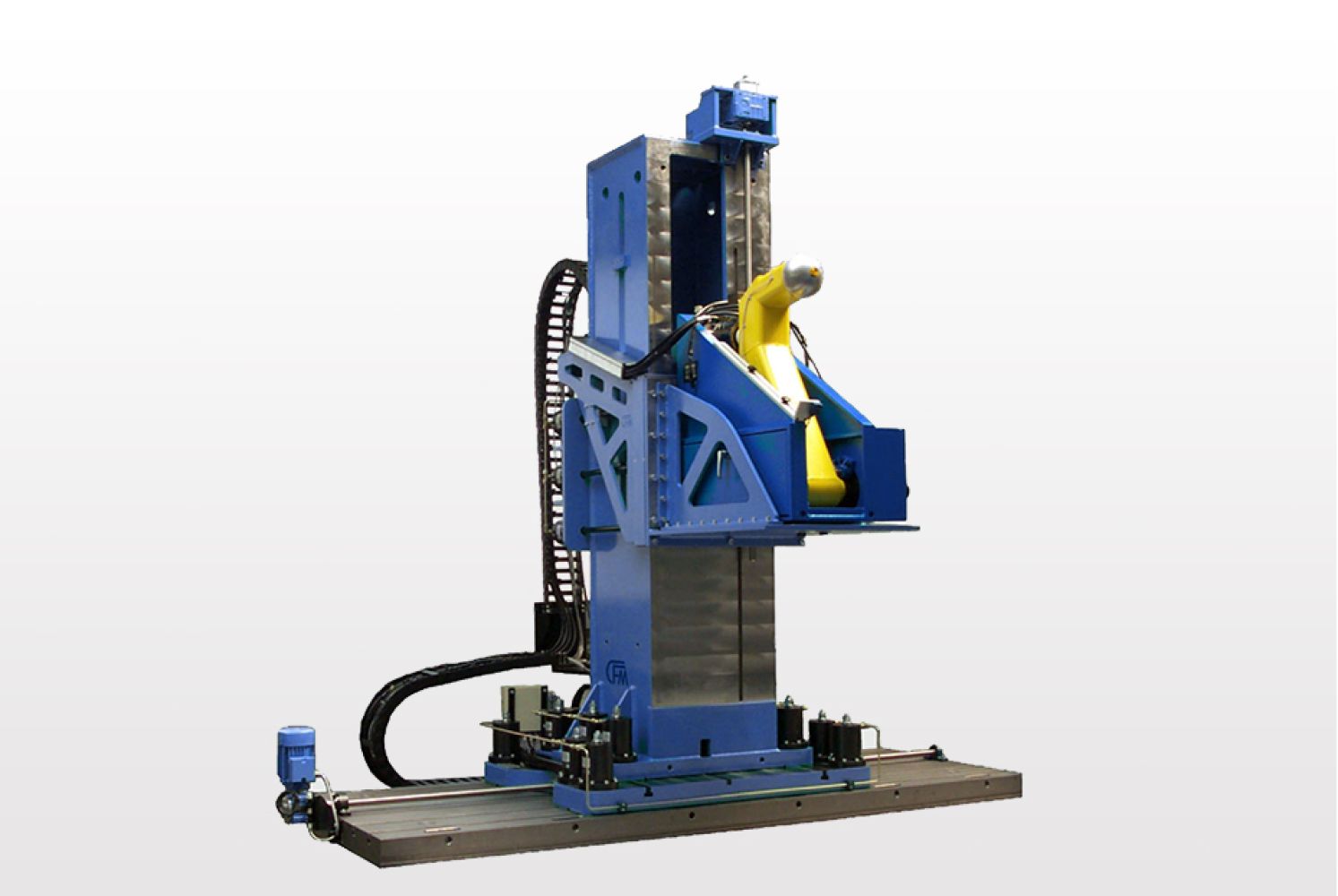
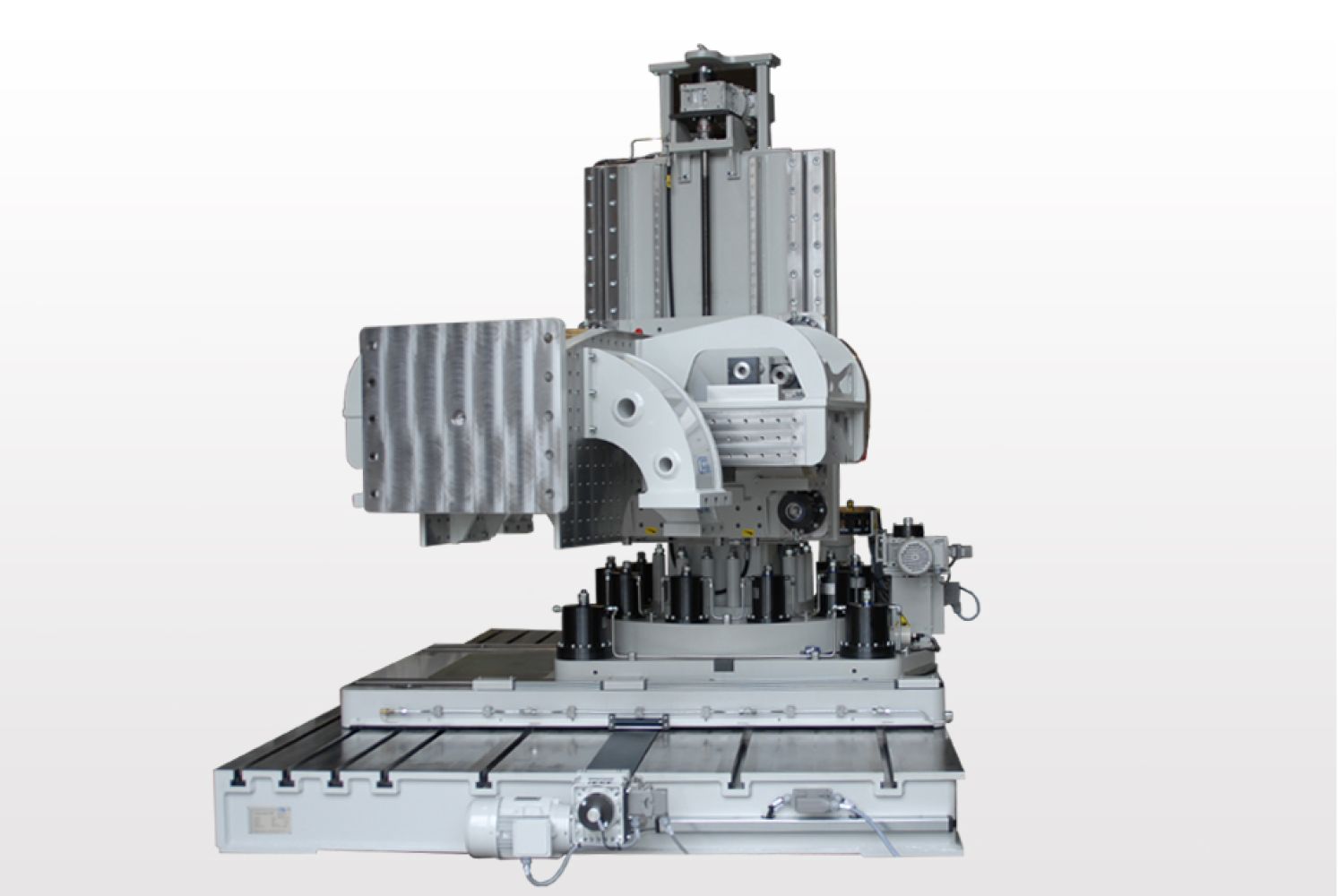
侧面碰撞摆锤4轴定位系统
CFM的4轴定位系统提供了围绕垂直轴的额外第4旋转自由度。它用于车辆车桥的滥用破坏性测试。相应的车桥适用于CFM万能车桥夹具DAFA系统,该系统本身通过法兰连接到4轴定位系统。这样,试验样品可以以几乎任何可能的方式定位并朝向冲击机构旋转。
其基本设计类似于3D定位系统。定位板配有T形槽和精确的线性导轨。平移定位是通过PLC控制的主轴驱动器和电机来实现的。使用全自动弹簧锁紧缸进行锁紧也是类似的。通过具有外齿轮和电机的旋转板,实现了具有车桥夹具系统的Z柱约±90°的额外旋转。
控制系统具有与三维版本相同的功能。它仅扩展了旋转驱动控制、定位精度所需的传感器和旋转板的锁紧机构。